Resilient by Design
Built to keep flying
SwarmOS is engineered to handle degraded conditions, communication loss, and dynamic environments without mission failure or operator intervention.

A mission-intent coordination layer for autonomous multi-drone operations. Translates high-level objectives into coordinated multi-vehicle action — integrating with commercial hardware to avoid vendor lock-in, built on an open-source drone operating system.
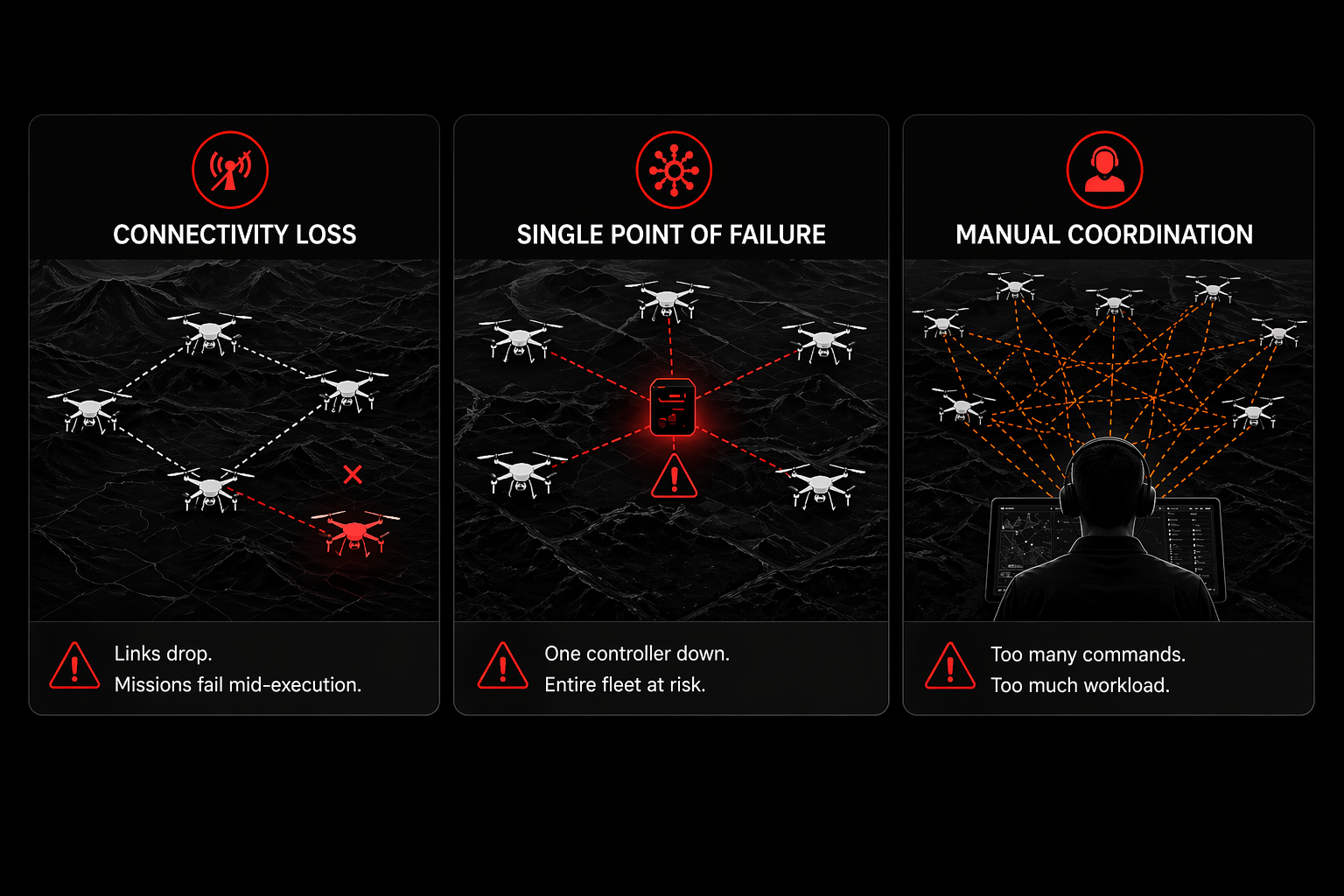
Contact UsCentralized control, connectivity dependence, and manual coordination create brittle systems that break under real operational conditions.
SwarmOS is engineered to handle degraded conditions, communication loss, and dynamic environments without mission failure or operator intervention.
Built for contested, bandwidth-limited environments. Fleet-level behavior without relying on a single control point, with real-time collaborative adaptation across vehicles.
Maintains operational continuity through dynamic routing, fault-aware communication, and distributed decision support — keeping missions on track as conditions change.
The software foundation to move from single-drone workflows to coordinated multi-drone operations without rewriting your stack or switching platforms.
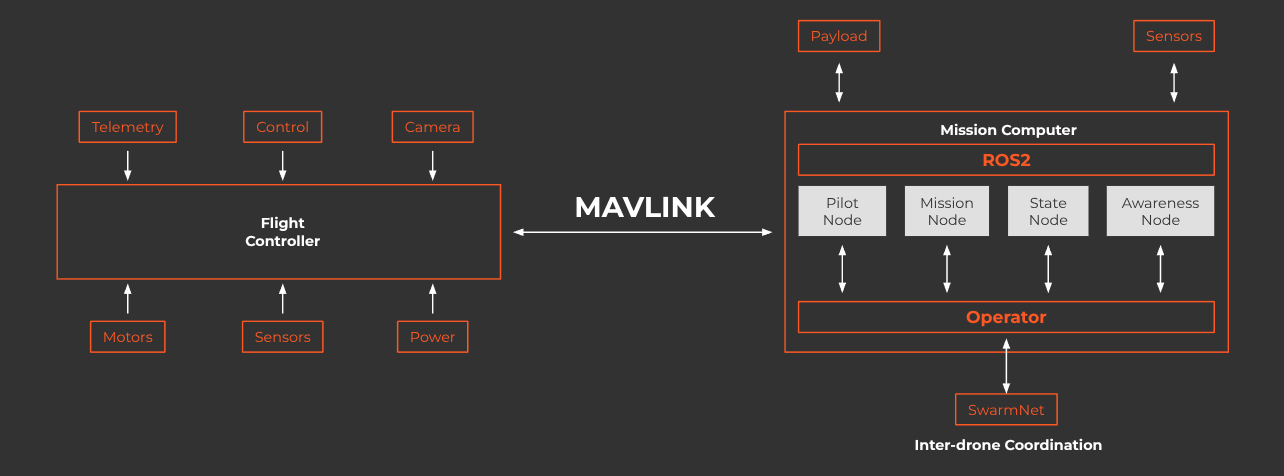
SwarmOS connects your flight controller via MAVLink to a ROS 2 mission computer running coordinated autonomy nodes — with SwarmNet handling inter-drone communication across the fleet.
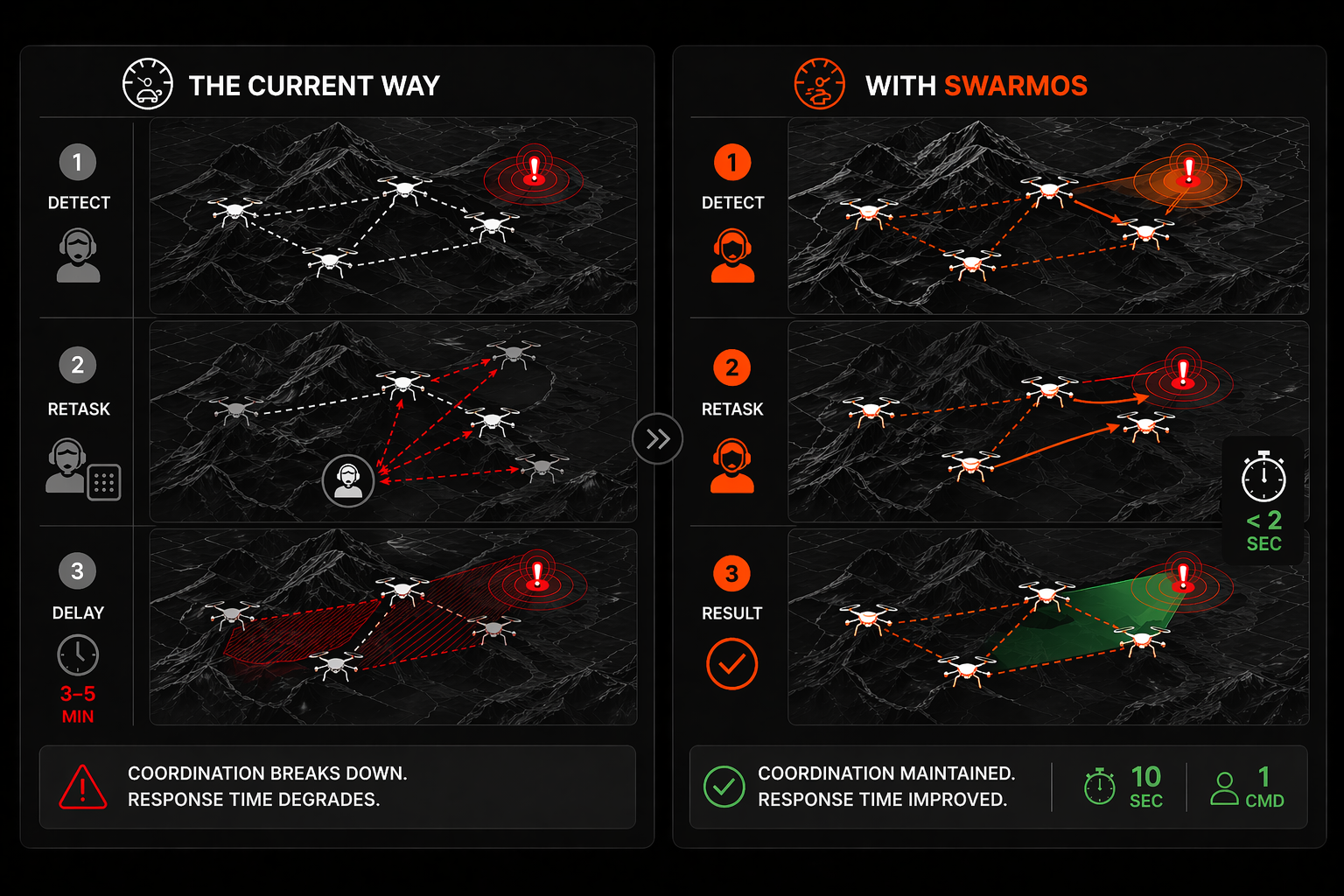
When conditions change mid-mission, SwarmOS retasks the fleet in under 2 seconds. The current approach takes 3–5 minutes — and breaks coordination in the process.
Reach out to discuss your use case and how SwarmOS fits your operations.